ROS 2 Router for Remote Robotics and Topic Filtering

At Husarnet, we’re streamlining ROS 2 networking across the Internet to be as easy and reliable as possible.
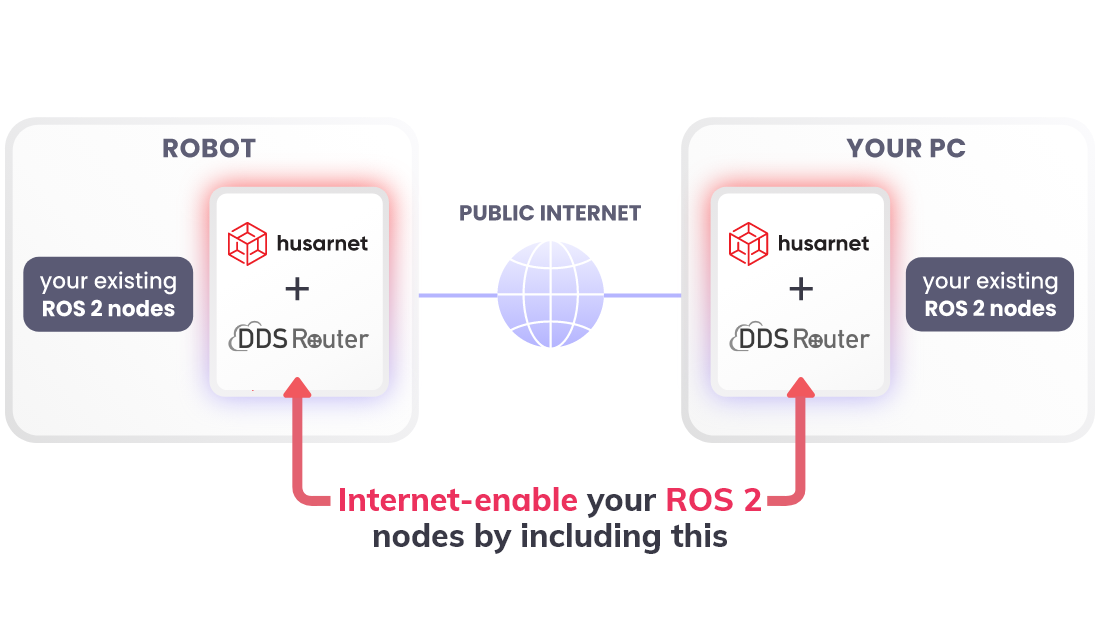
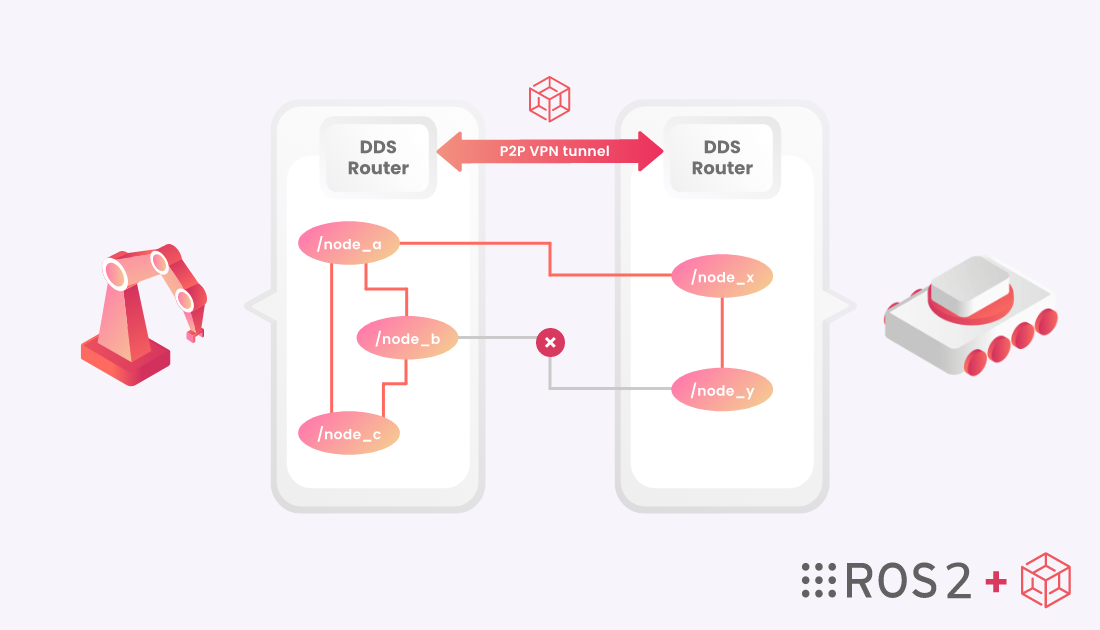
We're introducing the new husarnet/ros2router Docker image, which allows you to easily bridge ROS 2 nodes running across different robots, servers, or laptops in various networks. It features built-in topic filtering, enabling you to decide in real-time which ROS 2 interface should be exposed to remote hosts.
There's no need to change your DDS settings. Simply run our Docker image alongside your existing ROS 2 application, regardless of whether it's running on a host or inside Docker containers.
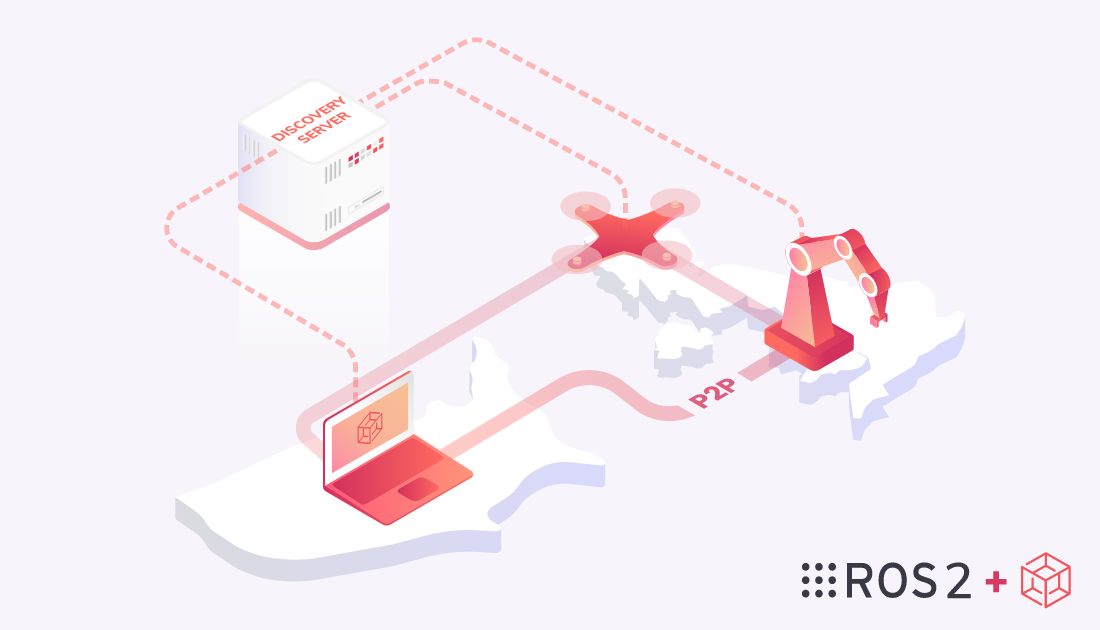
Discover how to integrate husarnet/ros2router with your robots, computers, or multi-tenant cloud applications and understand how it works in the following sections.