Scalable Distributed Robot Fleet With Fast DDS Discovery Server

ROS 2 is rapidly increasing its share in new projects in the AMR (Autonomous Mobile Robots) sector. While the amount of autonomous mobile robots is growing, the robotic fleet becomes less and less efficient. To overcome that, the next gen robots need to operate not as a group of individual devices, but as one, decentralized robotic system. That leads to connectivity challenges.
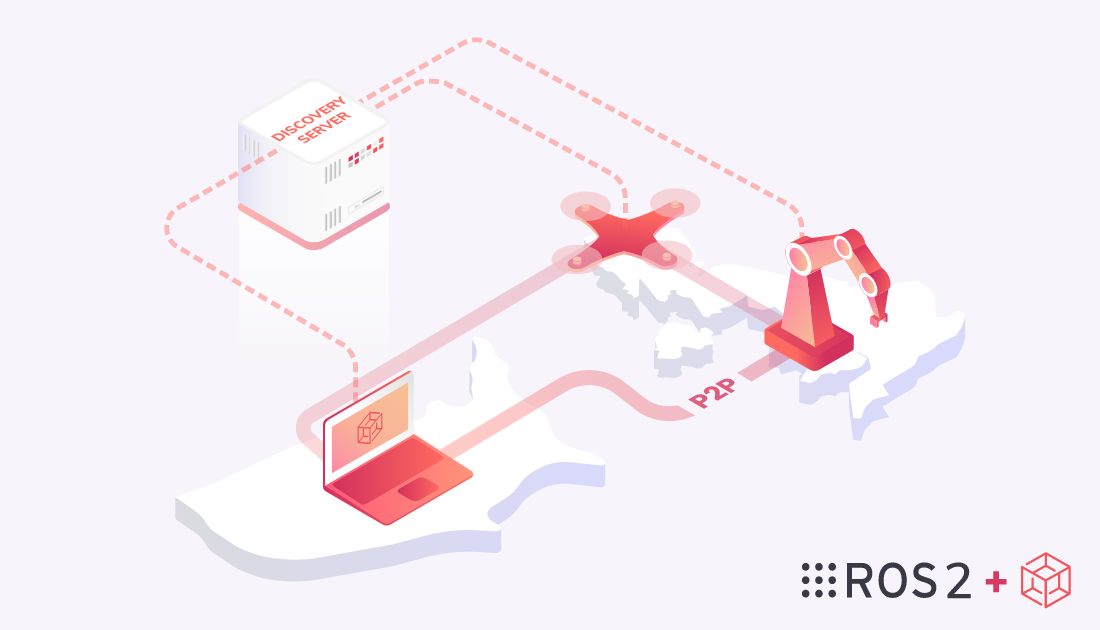
Classical approach with a standard DDS service discovery mechanism, relying on multicast messages being sent in a single LAN network, becomes a factor limiting a system's scalability.
Fortunately the eProsima Fast DDS Discovery Server combined with Husarnet peer-to-peer SDN solved all those issues by providing efficient way of service discovery and message exchange across devices connected to multiple physical networks.