How To Access A Local Web Server From The Internet
· 15 min read

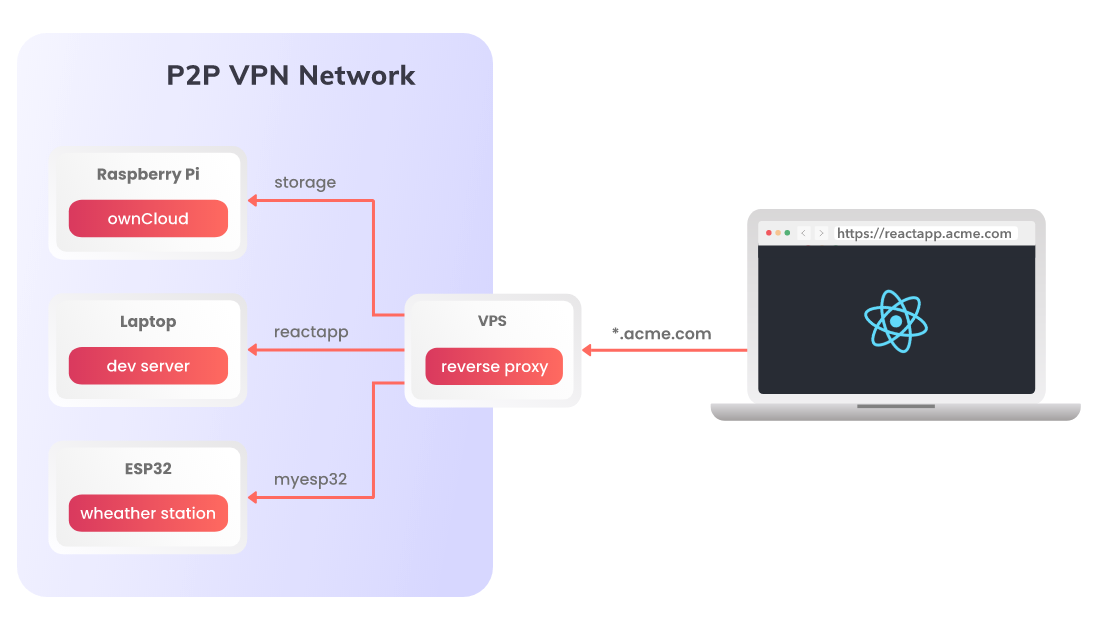
In one of the previous blog posts we presented how to configure a reverse proxy in NGINX to provide public access to services hosted by Husarnet connected devices.
Today I will share my notes on how to do something similar, but using a nice user interface provided by Nginx Proxy Manager and your own custom domain with SSL certificates.
By combining two open source projects: Husarnet & Nginx Proxy Manager you can create your own, self-hosted secure tunnel service for localhosts, similar to ngrok.
🚀 I will show you also how to deploy the service in seconds, with the Infrastructure as Code approach powered by Ansible and GitHub Actions.
Let's go!